人間は無意識にものをつかんでいるが、こうした作業をロボットに行わせるのはそれほど簡単ではない。人間の場合、まずものを視覚で捉えてその大きさや形状を知り、材質を判断して重さを想像する。そして、軽そうに見えるものならば柔らかくつかもうとするし、重そうに見えるものならばしっかりとつかもうとする。こうした、人間にとってごく当たり前の動作を、ロボットで再現することが難しいのだ。そうした課題を、柔らかな素材を使って解決する、ソフトロボットハンドの開発が進んでいる。
柔らかい指とセンサーでものをつかむ
少子高齢化による労働力不足を補うために、従来は人間が担っていた仕事をロボットに置き換えようとする動きが加速している。そうしたロボットが働く現場では、人間の隣にロボットがいて作業しても安全なように、従来から使われてきた金属などの固い素材ではなく、ゴムやエラストマーなどの柔らかな素材が外殻に使われる。
こうした、ソフトロボットと呼ばれるロボットの活用領域は広い。例えば、食品工場などでの食材のパッキング作業においても、人手不足による生産性の低下をロボットの導入で補おうとしているが、ほとんどの食材は柔らかくて形状も多様であるため、柔らかな素材で作られたソフトロボットハンドでつかむ必要がある。その際、ソフトロボットハンドの動きを検出する触覚センサー自身も、食材をつかむ際の変形を妨げないように、柔らかな素材の利用が求められている。
そこで、産業技術総合研究所と立命館大学は共同で、フレキシブルセンサーでソフトロボットハンドの「つかむ、放す、つかみ損ねる」をセンシングする技術を研究している。その結果、イオン導電性高分子センサー(外部からの力で内部のイオンが移動して生じる電圧によって、力の強さやひずみを検出するセンサー)をソフトロボットハンドの屈曲センサーとして用いると、ロボットハンドがものをつかむ際に指を曲げ伸ばす「動き」と、指の屈曲度合いの「形状」の両方が検出でき、さらにつかんだものを落としたことも判断できることを発見した(図1)。
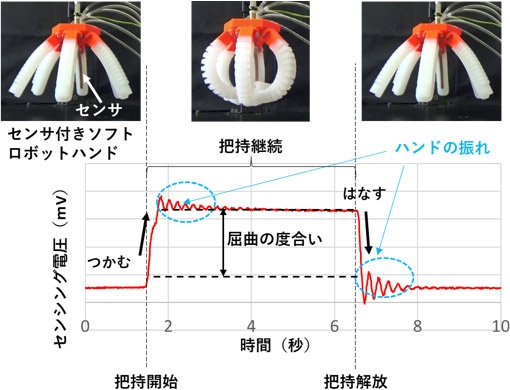
(図1)ソフトロボットハンドの動きとイオン導電性高分子センサーの電圧の変化(出典:産業技術総合研究所のプレスリリース)
従来から使用されてきた圧電式フレキシブルセンサー(外部からの力によってセンサー内に電圧が発生し、その電圧を検出することで力によるひずみなどを検出するセンサー)は、ロボットハンドの指を曲げ伸ばしてものをつかんだり離したりする「動き」しか検出できず、ものをつかんで静止した後、どの程度指が屈曲しているかという「形状」を検出するのが難しい。
これに対してイオン導電性高分子センサーは、指の「動き」だけでなく、静止後の指の「形状」もあわせて検出できるので、ロボットハンドがつかんだものの大きさや、正しくつかみ続けられているかの情報まで得られる。さらに、つかんだものを落とした際に起きるロボットハンドの微細な振動も検出して解析することで、落下が判断できるようになった(動画1)。
(動画1)ソフトロボットハンドを構成する柔らなアクチュエータとセンサー(出典:産業技術総合研究所の公式YouTubeチャンネル)
ゴムチューブの指でものをつかむソフトロボットハンド
ソフトロボットハンドの指そのものも、進化している。ブリヂストンのソフトロボティクス事業の社内ベンチャーであるソフトロボティクス ベンチャーズは、ゴム素材の研究開発の知見を活かし、タイヤや油圧ホースの技術を適用したゴムチューブと、それを囲む高強度繊維のスリーブから構成される「ラバーアクチュエータ」を開発した(写真)。
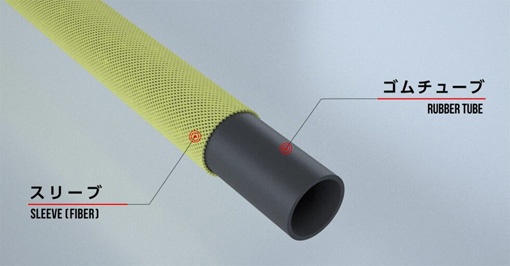
(写真)ソフトロボティクス ベンチャーズが開発した「ラバーアクチュエータ」(出典:ブリヂストンのWebページより)
ラバーアクチュエータは油圧で動作し、内部に空気や油を注入して高い圧力を加えると、チューブが膨張して人間の筋肉のように伸縮する。その際に生まれる力が、アクチュエータとして機能する。基本的にはゴムチューブであるため、構造がシンプルかつ軽量で、外部から力が加わっても従来のゴムチューブのようにフレキシブルに変形し、強い衝撃による変形にも耐えられる(図2)。

(図2)ラバーアクチュエータがもつ特徴(出典:ブリヂストンのWebページより)
からの記事と詳細 ( 柔らかくものをつかむソフトロボットハンド | 未来コトハジメ - 日経BP )
https://ift.tt/I8jL2gb
No comments:
Post a Comment